



Четвероногий робот научился автономно перепрыгивать препятствия на маршруте

Американские инженеры научили четвероногого робота автономно перепрыгивать препятствия. Его планировщик маршрута состоит из двух элементов, один из которых прокладывает пеший маршрут по той области, где нет препятствий, а второй отвечает за расчет траектории прыжка через не очень высокие препятствия. Статья будет представлена на конференции CASE 2021, но уже доступна на arXiv.org.
Разработчики четвероногих роботов позиционируют их как инструмент для осмотра труднодоступной и опасной для человека местности, потому что они лучше колесных роботов справляются с неровным рельефом и препятствиями на пути, перешагивая или взбираясь на них. Также четвероногие роботы, по крайней мере некоторые из них, способны прыгать. Например, в 2019 году разработчики Mini Cheetah из Массачусетского технологического института показали, как он научился делать обратное сальто, а позднее это же продемонстрировала Unitree Robotics. Но пока прыжки — это лишь эффектная демонстрация достижений, которая не используется в четвероногих роботах в качестве одного из типов движений.
Инженеры из Калифорнийского университета в Беркли под руководством Кушиля Срината (Koushil Sreenath) показали на примере Mini Cheetah как прыжки можно интегрировать в алгоритм автономного прокладывания маршрута четвероногого робота. Сам робот представляет собой модельное устройство для отработки алгоритмов и в нем использована стандартная для таких роботов конструкция с двухсекционными ногами, которые приводятся в движение электромоторами.
В роботе инженеров из Беркли также была установлена камера глубины. С ее помощью робот создает 3D- и 2D-карты пространства перед ним. Благодаря определению глубины на снимках он размечает пространство на воксели (трехмерный аналог пикселей), а также создает из них двумерную карту, в которой отображена высота объектов. Получив от человека точку, в которую ему необходимо прийти, робот рассчитывает маршрут, опираясь на высоту объектов — если препятствие на пути слишком высокое, он строит маршрут в обход, а если его можно перепрыгнуть, оно помечается как проходимое и маршрут строится через него. Также алгоритм оценивает высоту препятствий сверху: например, если на пути есть отверстие в виде окошка, то алгоритм рассчитывает, не столкнется ли робот с верхней частью во время прыжка.
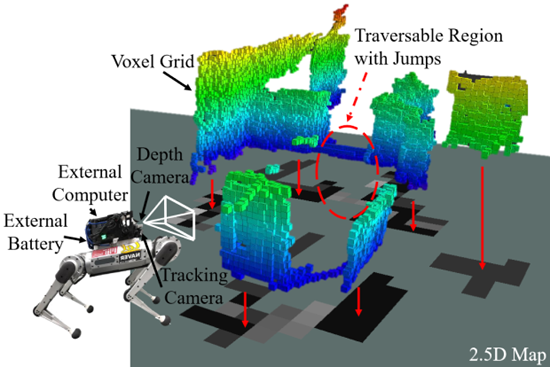
Сканирование пространства роботом
После того, как робот подошел к препятствию, он запускает последовательность прыжка: отталкивается передними ногами, поднимая переднюю часть корпуса, затем отталкивается задними ногами и переходит в фазу полета, во время которой избегает столкновения ног с препятствием, а в конце приземляется на все четыре ноги.
Эксперименты показали, что вместе с набором датчиков массой 2,25 килограмм робот перепрыгивает препятствия высотой до 13 сантиметров, а без датчиков ему под силу преодолеть 24-сантиметровые преграды.
Постепенно инженеры делают доступными для четвероногих роботов все новые движения. Например, в прошлом году итальянские и бельгийские разработчики научили робота балансировать на двух ногах из четырех.