



Беспилотные автомобили способны ускорить трафик на треть
Согласно исследованию Кембриджского университета, автономные транспортные средства, которые могут связываться друг с другом для обеспечения бесперебойного движения, улучшат общий транспортный поток как минимум на 35%, пишет Gimate.
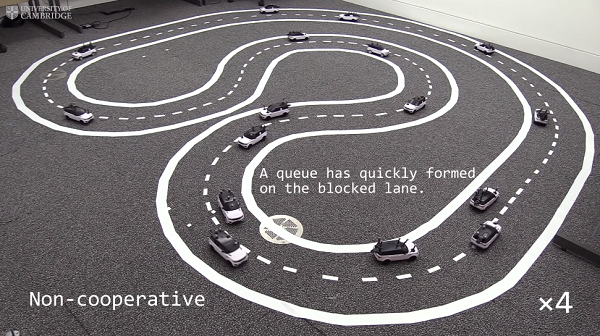
Исследователи запрограммировали небольшой парк миниатюрных роботизированных автомобилей для движения по многополосной трассе и наблюдали, как изменится транспортный поток, когда одна из машин остановится.
Когда автомобили не связываются друг с другом для передачи данных, любые транспортные средства за стоящей машиной тоже останавливаются, после чего довольно быстро образовывается пробка, и общий транспортный поток замедляется.
Однако, когда автомобили "общались" между собой, как только одна машина останавливалась, она посылала сигнал всем остальным. Автомобили на внешней полосе, которые находились в непосредственной близости от остановленной машины, немного замедлились, так что авто на внутренней полосе могли быстро проехать без необходимости существенно замедляться.
Кроме того, когда управляемый человеком автомобиль поместили на "трассу" и он агрессивно перемещался по ней, другие беспилотные авто смогли уступить дорогу водителю, что повысило безопасность.
Результаты, представленные на Международной конференции по робототехнике и автоматизации (ICRA) в Монреале, будут полезны для изучения того, как беспилотные автомобили могут "общаться" друг с другом и с транспортными средствами, управляемыми водителями, на реальных дорогах в будущем.
"Беспилотные автомобили могут решить множество различных проблем, связанных с вождением в городах, но для них должен быть способ совместной работы. Если разные производители разрабатывают свои автономные ТС с собственным программным обеспечением, все эти автомобили должны эффективно "общаться" друг с другом", - утверждают авторы исследования Майкл Хе и Николас Хилдмар.

Многие существующие тесты для беспилотных автомобилей выполняются в цифровом виде или с использованием масштабных моделей, которые либо слишком велики, либо слишком дороги для проведения экспериментов.
Начиная с недорогих масштабных моделей имеющихся в продаже автомобилей с реалистичными системами рулевого управления, исследователи из Кембриджа встроили в авто датчики захвата движения и Raspberry Pi, чтобы они могли передавать друг другу данные через Wi-Fi.
Затем они адаптировали алгоритм смены полосы движения. Исходный алгоритм решает, когда автомобиль должен сменить полосу движения, в зависимости от того, безопасно ли это делать, и будет ли авто быстрее передвигаться. Адаптированный алгоритм позволяет более плотно "упаковывать" автомобили при смене полос движения и добавляет ограничение безопасности для предотвращения аварий при низких скоростях.
Исследователи проверили автопарк в "эгоцентричном" и "кооперативном" режимах вождения, и наблюдали, как авто реагировали на остановленную машину. В нормальном режиме кооперативное вождение улучшило транспортный поток на 35%, в то время как для агрессивного вождения улучшение составило 45%.
"Наша конструкция позволяет проводить широкий спектр практических недорогих экспериментов на беспилотных автомобилях. Чтобы автономные ТС можно было безопасно использовать на реальных дорогах, нужно знать, как они будут взаимодействовать друг с другом", - заявила доктор Аманда Пророк из Кембриджского факультета компьютерных наук и технологий.
В будущей работе исследователи планируют использовать парк для тестирования систем с несколькими автомобилями в более сложных сценариях, включая дороги с большим количеством полос движения, перекрестками и разными типами транспортных средств.