



Австрийская компания представила автономного робота для зарядки электромобилей
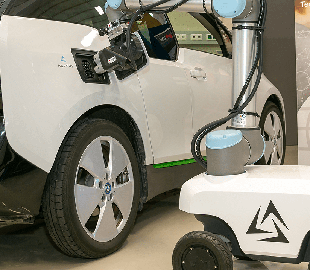
Компания TU GrazСовместно с австрийскими компаниями Alveri и Arti Robots разработала полностью автономного мобильного зарядного робота. Прототип самостоятельно попадает в припаркованный электромобиль, где рука робота направляет кабель для зарядки к порту зарядки и закрепляет его там.
После процесса зарядки робот отключается от сети и удаляется от автомобиля. Инициаторы демонстрируют весь процесс на видео (в этой статье ниже). Между тем, прототип не стал концом истории: стартап Alveri в Верхней Австрии хочет в будущем серийно производить зарядных роботов для электромобилей. Однако, по словам партнеров, перед тем, как зарядный робот будет готов к серийному производству, еще предстоит провести некоторую оптимизацию.
На данный момент два компонента объединены в одно целое: мобильная платформа, которая может автономно перемещаться в космосе, и автоматизированная рука робота, которая подключает зарядный кабель к автомобилю. Arti Robots является экспертом в первом вопросе, и Технологический университет Граца также имеет опыт работы с роботами-зарядками, хотя и в большей степени в стационарных версиях . Alveri, стартап, специализирующийся на услугах устойчивой мобильности, выступает в качестве инициатора и финансиста проекта и, как уже упоминалось, хочет перейти к серийному производству зарядных роботов.
«Процесс заправки или зарядки автомобиля не представляет большой проблемы для человека. С другой стороны, для автоматизированной системы это очень сложный вопрос с точностью до миллиметра», — объясняет Бернхард Вальцель из Института автомобильной техники в Техническом университете Граца. Демонстратор самостоятельно ориентируется в пространстве и движется по направлению к транспортному средству со скоростью до 20 км/ч. Затем робот-манипулятор, установленный на туловище, выполняет процесс зарядки.
Партнеры видят приложения для мобильных зарядных роботов в первую очередь на многоэтажных автостоянках, на автостоянках или на больших стоянках для бизнеса. Однако зарядный робот еще далек от готовности к серийному производству. Например, в настоящее время он все еще подключен к кабелю питания. Поскольку, по мнению партнеров по проекту, интеграция приводной батареи не имеет смысла из-за веса и стоимости, но, прежде всего, с экологической точки зрения, они возятся с источником питания через заземляющие контакты. Кроме того, необходимо интегрировать программное обеспечение для управления роботом. На данный момент он работает на отдельном ПК.
Кроме того, демонстратор по-прежнему работает с обычным коллаборативным манипулятором промышленного робота, который «может делать больше, чем необходимо». В этом отношении команда разработчиков видит потенциальную экономию в весе и стоимости с помощью манипулятора, предназначенного исключительно для зарядки. Также необходимо прояснить юридические вопросы и вопросы, связанные с безопасностью, потому что «робот будет перемещаться в зоне, где движутся люди. Поэтому уверенность в безопасности системы является основным условием», — говорится в сопроводительном пресс-релизе.
Интерфейсы тоже проблема. Бернхард Вальцель: «За последние годы произошло невероятное количество разработок электронных транспортных средств, необходимой инфраструктуры, вариантов зарядки и автоматизированных систем. Теперь было бы важно, чтобы отдельные системы взаимодействовали друг с другом. На данный момент нам все еще нужно сигнализировать роботу, какой автомобиль он должен заряжать, открыв «крышку заливной горловины». Цель должна состоять в том, чтобы автомобиль самостоятельно сигнализировал роботу о необходимости зарядки. Или что водитель активирует робота через приложение. В ближайшем будущем будет много движения».