



Інженери створили м’якого робота, який рухається за допомогою тепла замість двигунів
Інженери Принстонського університету створили новий клас м’яких роботів, які рухаються без використання двигунів або громіздких зовнішніх систем. Розробка поєднує в собі гнучкі матеріали з вбудованою електронікою, що дозволяє машинам змінювати форму і виконувати контрольовані рухи за допомогою тепла. М’які роботи вже давно розглядаються як перспективне рішення для застосування в медицині, небезпечних дослідницьких місіях та при виконанні точних завдань.
Однак більшість існуючих конструкцій, як і раніше, покладаються на жорсткі компоненти або зовнішні повітряні насоси. Команда Принстона поставила собі за мету усунути ці обмеження, інтегрувавши принцип дії безпосередньо в матеріал. Для створення роботів дослідники використовували спеціалізований 3D-принтер, виготовляючи їх із рідкокристалічного еластомеру.
Цей полімер має впорядковану молекулярну структуру, що дозволяє інженерам програмувати його реакцію на нагрівання. Вчені надрукували матеріал у вигляді зон із контрольованим молекулярним вирівнюванням. Ці зони діють як шарніри: під час нагрівання вони згинаються передбачуваним чином. Шляхом накладання та з’єднання таких зон команда створила структури, які складаються та розгортаються за командою.
Цей підхід вбудовує рух безпосередньо в матеріал, а не додає механічні з’єднання пізніше. Крім того, у процесі друку були інтегровані гнучкі друковані плати, що виключило необхідність окремого складання та підвищило надійність. Вбудовані ланцюги дозволяють точно нагрівати певні ділянки, і це нагрівання викликає скорочення полімеру, яке й призводить до руху.
Система включає датчики температури, що забезпечують зворотний зв’язок у реальному часі, що дозволяє реалізувати замкнутий цикл управління і допомагає роботу зберігати точність при повторюваних циклах. Для направлення процесу складання команда додала легкі склопластикові панелі між шарнірами, які гарантують, що згин відбувається тільки в заданих місцях.
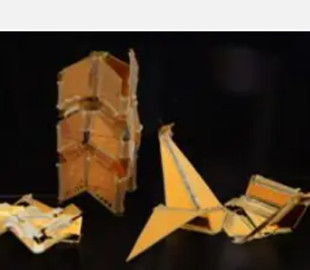
Для демонстрації дослідники створили робота у формі журавля, натхненного орігамі. Ця конструкція махає крилами під час подачі електроенергії та виконує повторювані рухи без помітного зносу. Команда використовувала математичні моделі з дизайну орігамі для програмування цих рухів, а також підкреслила важливість корекції помилок: система використовує зворотний зв’язок від датчиків, щоб коригувати невеликі відхилення з плином часу, що підвищує довговічність і стабільність роботи.
Проєкт починався як дипломна робота бакалавра Девіда Бершадського, який навчався на електротехнічному факультеті та закінчив університет у 2024 році. Він шукав спосіб легко та багаторазово створювати елементарні комірки, здатні змінювати форму залежно від об’єму. Бершадскі співпрацював з іншими дослідниками та долучився до курсу з інженерії орігамі, що визначило напрямок проекту. Він описав свою роботу як об’єднання дисциплін і зазначив, що ключовим внеском стала демонстрація інтеграції складної системи з локальним керуванням нагріванням.
Він також розробив програмний інструмент, що дозволяє іншим створювати аналогічних роботів. Незважаючи на прогрес, найскладнішим етапом залишалася саме системна інтеграція, оскільки весь проект, за словами Бершадського, і являв собою об’єднання безлічі різних технологій.
Источник: noworries.news